8.8: Вектори
- Page ID
- 61241

- Подивитися вектори геометрично.
- Знайти величину і напрямок.
- Виконайте додавання векторів і скалярне множення.
- Знайдіть складову форму вектора.
- Знайти вектор одиниці виміру в напрямку\(v\).
- Виконуйте операції з векторами в терміні\(i\) і\(j\).
- Знайдіть крапковий добуток двох векторів.
Літак летить зі швидкістю польоту\(200\) миль на годину на чолі на підшипнику SE\(140°\). Північний вітер (з півночі на південь) дме зі швидкістю\(16.2\) миль на годину, як показано на малюнку\(\PageIndex{1}\). Що таке швидкість землі і фактичний підшипник літака?
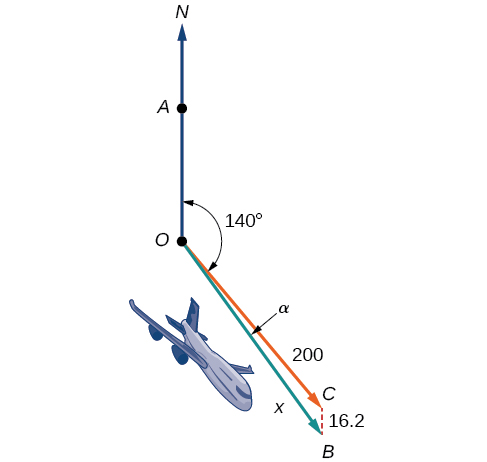
Малюнок\(\PageIndex{1}\)
Наземна швидкість відноситься до швидкості площини щодо землі. Повітряна швидкість відноситься до швидкості, яку літак може подорожувати щодо навколишньої повітряної маси. Ці дві величини не однакові через вплив вітру. У більш ранньому розділі ми використовували трикутники для вирішення подібної проблеми, пов'язаної з рухом човнів. Пізніше в цьому розділі ми знайдемо швидкість та підшипник літака, досліджуючи інший підхід до проблем такого типу. Однак спочатку давайте розберемо основи векторів.
Геометричний вигляд векторів
Вектор - це певна величина, намальована у вигляді відрізка лінії з наконечником стрілки на одному кінці. Він має початкову точку, де вона починається, і кінцеву точку, де вона закінчується. Вектор визначається його величиною, або довжиною лінії, і її напрямком, позначеного наконечником стрілки в кінцевій точці. Таким чином, вектор - це спрямований відрізок лінії. Існують різні символи, які відрізняють вектори від інших величин:
- Нижній регістр, напівжирний тип, зі стрілкою зверху або без такої \(u\), як\(w\),\(\overrightarrow{v}\),\(\overrightarrow{u}\),\(\overrightarrow{w}\).
- Враховуючи початкову точку\(P\) та\(Q\) кінцеву точку, вектор можна представити у вигляді\(\overrightarrow{PQ}\). Стрілка зверху - це те, що вказує на те, що це не просто лінія, а спрямований відрізок лінії.
- Враховуючи початкову точку\((0,0)\) та кінцеву точку\((a,b)\), вектор може бути представлений у вигляді\(⟨a,b⟩\).
Цей останній символ\(⟨a,b⟩\) має особливе значення. Його називають стандартним положенням. Вектор положення має початкову точку\((0,0)\) та кінцеву точку\(⟨a,b⟩\). Щоб змінити будь-який вектор на вектор положення, ми думаємо про зміну x -координат і зміну y -координат. Таким чином, якщо початкова точка вектора\(\overrightarrow{CD}\) є,\(C(x_1,y_1)\) а кінцева точка є\(D(x_2,y_2)\), то вектор положення знаходять шляхом обчислення
\[\begin{align*} \overrightarrow{AB} &= ⟨x_2−x_1,y_2−y_1⟩ \\[4pt] &= ⟨a,b⟩ \end{align*}\]
На\(\PageIndex{2}\) малюнку ми бачимо вихідний вектор\(\overrightarrow{CD}\) і вектор положення\(\overrightarrow{AB}\).
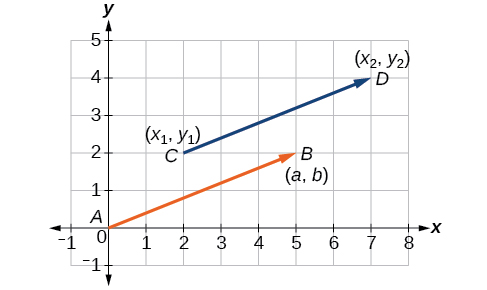
Малюнок\(\PageIndex{2}\)
Вектор - це спрямований відрізок лінії з початковою точкою і кінцевою точкою. Вектори ідентифікуються за величиною, або довжиною лінії, і напрямком, представленим стрілкою, що вказує на кінцеву точку. Вектор положення має початкову точку в\((0,0)\) і ідентифікується його кінцевою точкою\(⟨a,b⟩\).
Розглянемо вектор, початкова точка якого\(P(2,3)\) і кінцева точка є\(Q(6,4)\). Знайдіть вектор положення.
Рішення
Вектор положення знаходить шляхом віднімання однієї\(x\) -координати від іншої\(x\) -координати, а однієї\(y\) -координати від іншої\(y\) -координати. Таким чином
\[\begin{align*} v &= ⟨6−2,4−3⟩ \\[4pt] &=⟨4,1⟩ \end{align*}\]
Вектор позиції починається з\((0,0)\) і закінчується на\((4,1)\). Графіки обох векторів наведені на малюнку\(\PageIndex{3}\).
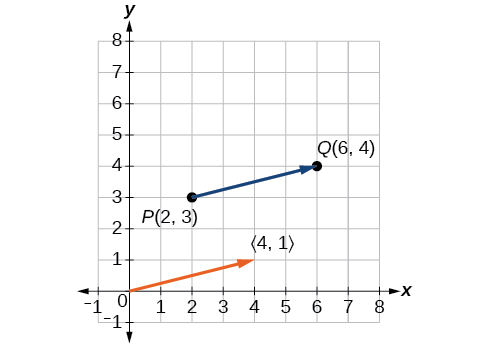
Малюнок\(\PageIndex{3}\)
Ми бачимо, що вектор положення є\(⟨4,1⟩\).
Знайдіть вектор положення, враховуючи, що вектор\(v\) має початкову точку в\((−3,2)\) і кінцеву точку в\((4,5)\), а потім графік обох векторів в одній площині.
Рішення
Вектор положення знаходить за допомогою наступного розрахунку:
\[\begin{align*} v &= ⟨4−(−3),5−2⟩ \\[4pt] &= ⟨7,3⟩ \end{align*}\]
Таким чином, вектор положення починається в\((0,0)\) і закінчується в\((7,3)\). Див\(\PageIndex{4}\). Малюнок.
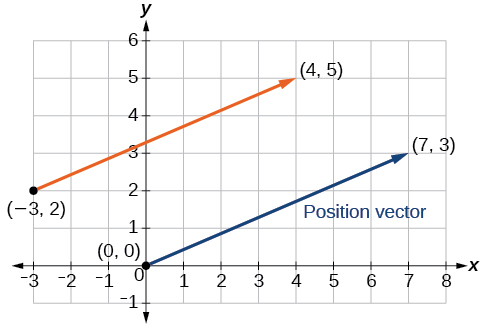
Малюнок\(\PageIndex{4}\)
Намалюйте вектор\(\vec{v}\), який з'єднується від початку до точки\((3,5)\).
- Відповідь
-
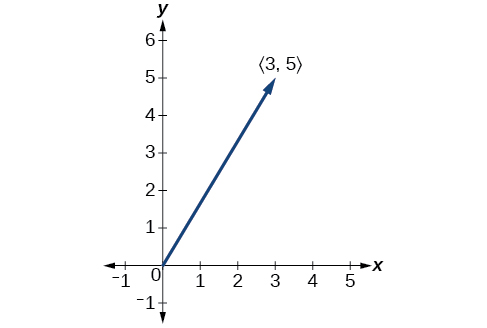
Малюнок\(\PageIndex{5}\)
Пошук величини та напряму
Для роботи з вектором нам потрібно вміти знаходити його величину і напрямок. Знаходимо його величину за допомогою теореми Піфагора або формули відстані, і знаходимо його напрямок за допомогою оберненої тангенсної функції.
За заданим вектором\(\vec{v}=⟨a,b⟩\) положення величина знаходить по\(| v |=\sqrt{a^2+b^2}\) .Напрямок дорівнює куту, утвореному з\(x\) -віссю, або з\(y\) -віссю, в залежності від застосування. Для вектора положення напрямок знаходиться за допомогою\(\tan \theta=\left(\dfrac{b}{a}\right)⇒\theta={\tan}^{−1}\left(\dfrac{b}{a}\right)\), як показано на малюнку\(\PageIndex{6}\).
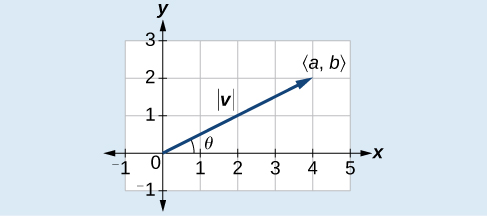
Малюнок\(\PageIndex{6}\)
Два вектора\(\vec{v}\) і\(\vec{u}\) вважаються рівними, якщо вони мають однакову величину і однаковий напрямок. Крім того, якщо обидва вектора мають однаковий вектор положення, вони рівні.
Знайдіть величину і напрямок вектора з початковою точкою\(P(−8,1)\) і кінцевою\(Q(−2,−5)\) точкою.Намалюйте вектор.
Рішення
Спочатку знайдіть вектор положення.
\[\begin{align*} u &= ⟨−2,−(−8),−5−1⟩ \\[4pt] &= ⟨6,−6⟩ \end{align*}\]
Ми використовуємо теорему Піфагора, щоб знайти величину.
\[\begin{align*} |u| &= \sqrt{{(6)}^2+{(−6)}^2} \\[4pt] &= \sqrt{72} \\[4pt] &=\sqrt{62} \end{align*}\]
Напрямок задається як
\[\begin{align*} \tan \theta & =\dfrac{−6}{6}=−1\rightarrow \theta={\tan}^{−1}(−1) \\[4pt] &= −45° \end{align*}\]
Однак кут закінчується в четвертому квадранті, тому ми додаємо,\(360°\) щоб отримати позитивний кут. Таким чином,\(−45°+360°=315°\). Див\(\PageIndex{7}\). Малюнок.
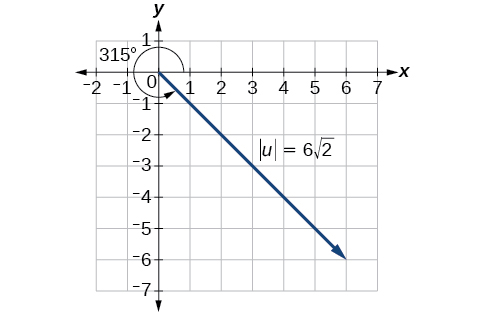
Малюнок\(\PageIndex{7}\)
Показати, що вектор\(\vec{v}\) з початковою точкою в\((5,−3)\) і кінцевою точкою в\((−1,2)\) дорівнює вектору\(\vec{u}\) з початковою точкою в\((−1,−3)\) і кінцевою точкою в\((−7,2)\). Намалюйте вектор положення на тій же сітці, що\(\vec{v}\) і\(\vec{u}\). Далі знайдіть величину і напрямок кожного вектора.
Рішення
Як показано на малюнку\(\PageIndex{8}\), намалюйте вектор,\(\vec{v}\) починаючи з початкової\((5,−3)\) та кінцевої точки\((−1,2)\). Намалюйте вектор\(\vec{u}\) з початковою точкою\((−1,−3)\) та кінцевою точкою\((−7,2)\). Знайдіть стандартну позицію для кожного.
Далі знайдіть і намалюйте вектор положення для\(\vec{v}\) і\(\vec{u}\). У нас є
\[\begin{align*} v &= ⟨−1−5,2−(−3)⟩ \\[4pt] &= ⟨−6,5⟩u \\[4pt] &= ⟨−7−(−1),2−(−3)⟩ \\[4pt] & =⟨−6,5⟩ \end{align*}\]
Так як вектори положення однакові,\(\vec{v}\) і\(\vec{u}\) однакові.
Альтернативний спосіб перевірки векторної рівності - показати, що величина і напрямок однакові для обох векторів. Щоб показати, що величини рівні, використовують теорему Піфагора.
\[\begin{align*} |v| &= \sqrt{{(−1−5)}^2+{(2−(−3))}^2} \\[4pt] &= \sqrt{{(−6)}^2+{(5)}^2} \\[4pt] &= \sqrt{36+25} \\[4pt] &= \sqrt{61} \\[4pt] |u| &= \sqrt{{(−7−(−1))}^2+{(2−(−3))}^2} \\[4pt] &=\sqrt{{(−6)}^2+{(5)}^2} \\[4pt] &= \sqrt{36+25} \\[4pt] &= \sqrt{61} \end{align*}\]
Оскільки величини рівні, нам тепер потрібно перевірити напрямок. Використання функції дотичної з вектором положення дає
\[\begin{align*} \tan \theta &= −\dfrac{5}{6}⇒\theta={\tan}^{−1}\left(−\dfrac{5}{6}\right) \\[4pt] & = −39.8° \end{align*}\]
Однак ми бачимо, що вектор позиції закінчується у другому квадранті, тому ми додаємо\(180°\). Таким чином, напрямок є\(−39.8°+180°=140.2°\).
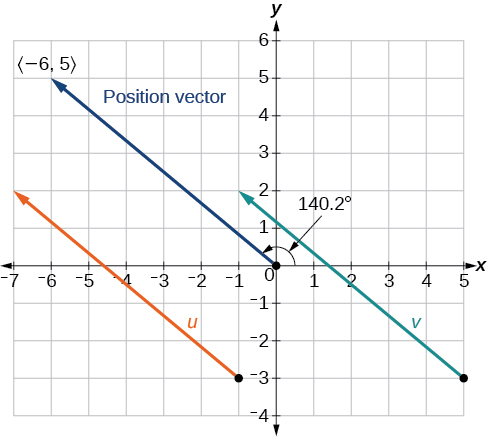
Малюнок\(\PageIndex{8}\)
Виконання векторного додавання та скалярного множення
Тепер, коли ми розуміємо властивості векторів, ми можемо виконувати операції з їх участю. Хоча зручно думати про вектор\(u=⟨x,y⟩\) як стрілку або спрямований відрізок лінії від початку до точки\((x,y)\), вектори можуть бути розташовані в будь-якому місці площини. Сума двох векторів\(\vec{u}\) і\(\vec{v}\), або векторне додавання, створює третій вектор\(\overrightarrow{u+ v}\), результуючий вектор.
Щоб знайти\(\overrightarrow{u + v}\), ми спочатку малюємо вектор\(\vec{u}\), а з кінцевого кінця\(\vec{u}\), ми намалювали вектор\(\vec{v}\). Іншими словами, у нас є початкова точка\(\vec{v}\) зустрітися кінцевого кінця\(\vec{u}\). Ця позиція відповідає поняттю, що ми рухаємося уздовж першого вектора, а потім, від його кінцевої точки, рухаємося по другому вектору. Сума\(\overrightarrow{u + v}\) є результуючим вектором, оскільки вона є результатом додавання або віднімання двох векторів. Результуючий вектор рухається безпосередньо від початку\(\vec{u}\) до кінця\(\vec{v}\) прямим шляхом, як показано на малюнку\(\PageIndex{9}\).
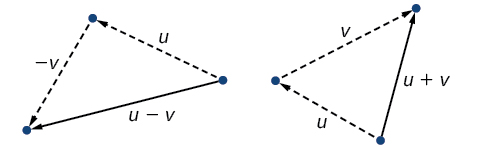
Малюнок\(\PageIndex{9}\)
Векторне віднімання схоже на додавання векторів. Щоб знайти\(\overrightarrow{u − v}\), перегляньте його як\(\overrightarrow{u + (−v)}\). Додавання\(\overrightarrow{−v}\) - це зворотний напрямок\(\vec{v}\) і додавання його до кінця\(\vec{u}\). Новий вектор починається на початку\(\vec{u}\) і зупиняється в кінцевій точці\(\overrightarrow{−v}\). Див. Рисунок\(\PageIndex{10}\) для візуального зображення, яке порівнює додавання векторів та віднімання векторів за допомогою паралелограм.
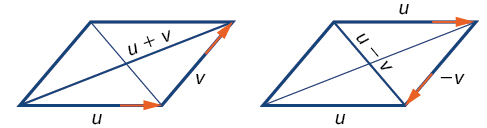
Малюнок\(\PageIndex{10}\)
Задано\(u=⟨3,−2⟩\) і\(v=⟨−1,4⟩\), знайдіть два нових вектора\(\overrightarrow{u + v}\), і\(\overrightarrow{u − v}\).
Рішення
Щоб знайти суму двох векторів, складаємо складові. Таким чином,
\[ \begin{align*} u+v &= ⟨3,−2⟩+⟨−1,4⟩ \\[4pt] &= ⟨3+(−1),−2+4⟩ \\[4pt] &=⟨2,2⟩ \end{align*}\]
Див\(\PageIndex{11a}\). Малюнок.
Щоб знайти різницю двох векторів, додайте негативні складові\(\vec{v}\) to\(\vec{u}\). Таким чином,
\[\begin{align*}u+(−v) &=⟨3,−2⟩+⟨1,−4⟩ \\[4pt] &= ⟨3+1,−2+(−4)⟩ \\[4pt] &= ⟨4,−6⟩ \end{align*}\]
Див\(\PageIndex{11b}\). Малюнок.
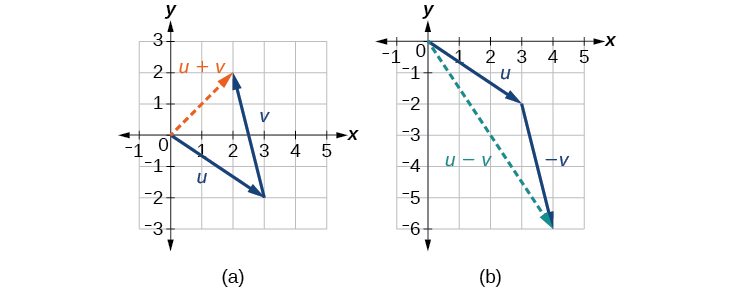
Малюнок\(\PageIndex{11}\): (а) Сума двох векторів (b) Різниця двох векторів
Множення на скаляр
У той час як додавання і віднімання векторів дає нам новий вектор з різною величиною і напрямком, процес множення вектора на скаляр, константу, змінює тільки величину вектора або довжину прямої. Скалярне множення не впливає на напрямок, якщо скаляр не є негативним, і в цьому випадку напрямок результуючого вектора протилежний напрямку вихідного вектора.
Скалярне множення передбачає добуток вектора і скаляра. Кожен компонент вектора множиться на скаляр. Таким чином, щоб\(v=⟨a,b⟩\) помножити на\(k\), ми маємо
\(kv=⟨ka,kb⟩\)
Змінюється тільки величина,\(k\) хіба що негативна, а потім вектор змінює напрямок.
Задано вектор \(\vec{v}=⟨3,1⟩\)\(3\vec{v}\), знайти\(\dfrac{1}{2}\), і\(\vec{−v}\).
Рішення
Див. Рисунок\(\PageIndex{12}\) для геометричної інтерпретації. Якщо\(\vec{v}=⟨3,1⟩\), то
\[\begin{align*} 3v &= ⟨3⋅3,3⋅1⟩ \\[4pt] &= ⟨9,3⟩ \\[4pt] \dfrac{1}{2}v &= ⟨\dfrac{1}{2}⋅3,\dfrac{1}{2}⋅1⟩ \\[4pt] &=⟨\dfrac{3}{2},\dfrac{1}{2}⟩ \\[4pt] −v &=⟨−3,−1⟩ \end{align*}\]
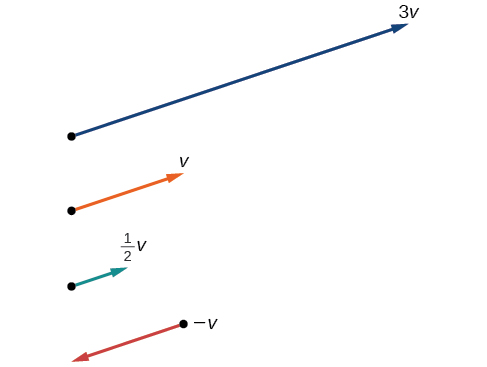
Малюнок\(\PageIndex{12}\)
Аналіз
Зверніть увагу,\(3\vec{v}\) що вектор в три рази більше довжини\(\vec{v}\),\(\dfrac{1}{2}\vec{v}\) половина довжини\(\vec{v}\) і\(\overrightarrow{–v}\) є такою ж довжиною\(\vec{v}\), але в зворотному напрямку.
Знайдіть\(3u\) задане скалярне кратне\(\vec{u}=⟨5,4⟩\).
- Відповідь
-
\(3u=⟨15,12⟩\)
Знайдіть лінійне рівняння для вирішення наступних невідомих величин: Одне число перевищує інше число на\(17\) і їх сума дорівнює\(31\). Знайдіть два числа.
Рішення
По-перше, ми повинні помножити кожен вектор на скаляр.
\[\begin{align*} 3u &= 3⟨3,−2⟩ \\[4pt] &= ⟨9,−6⟩ \\[4pt] 2v &= 2⟨−1,4⟩ \\[4pt] &= ⟨−2,8⟩ \end{align*}\]
Потім складіть два разом.
\[\begin{align*} w &= 3u+2v \\[4pt] &=⟨9,−6⟩+⟨−2,8⟩ \\[4pt] &= ⟨9−2,−6+8⟩ \\[4pt] &= ⟨7,2⟩ \end{align*}\]
Отже,\(w=⟨7,2⟩\).
Пошук форми компонента
У деяких додатках, що стосуються векторів, нам корисно мати можливість розбити вектор на його компоненти. Вектори складаються з двох компонентів: горизонтальна складова - це\(x\) напрямок, а вертикальна -\(y\) напрямок. Наприклад, ми бачимо на графіку на малюнку\(\PageIndex{13}\), що вектор положення\(⟨2,3⟩\) походить від додавання векторів\(v_1\) і\(v_2\). Ми маємо\(v_2\) з початковою точкою\((0,0)\) та кінцевою точкою\((2,0)\).
\[\begin{align*} v_1 &= ⟨2−0,0−0⟩ \\[4pt] &= ⟨2,0⟩ \end{align*}\]
Ми також маємо\(v_2\) з початковою точкою\((0,0)\) та кінцевою точкою\((0, 3)\).
\[\begin{align*} v_2 &= ⟨0−0,3−0⟩ \\[4pt] &= ⟨0,3⟩ \end{align*}\]
Тому вектор положення є
\[\begin{align*} v &= ⟨2+0,3+0⟩ \\[4pt] &= ⟨2,3⟩ \end{align*}\]
Використовуючи теорему Піфагора, величина\(v_1\) is\(2\), і величина\(v_2\) is\(3\). Щоб знайти величину\(v\), скористайтеся формулою з вектором положення.
\[\begin{align*} |v| &= \sqrt{{|v_1|}^2+{|v_2|}^2} \\[4pt] &= \sqrt{2^2+3^2} \\[4pt] &= \sqrt{13} \end{align*}\]
Величина\(v\) є\(\sqrt{13}\). Щоб знайти напрямок, скористаємося функцією дотичної\(\tan \theta=\dfrac{y}{x}\).
\[\begin{align*} \tan \theta &= \dfrac{v_2}{v_1} \\[4pt] \tan \theta &= \dfrac{3}{2} \\[4pt] \theta &={\tan}^{−1}\left(\dfrac{3}{2}\right)=56.3° \end{align*}\]
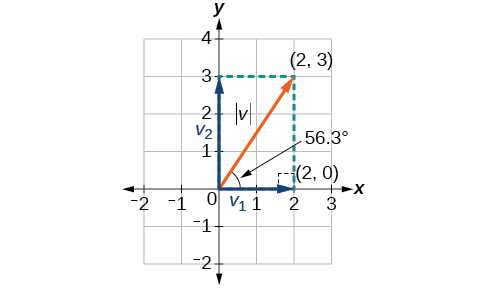
Малюнок\(\PageIndex{13}\)
Таким чином, величина\(\vec{v}\) є\(\sqrt{13}\) і напрямок\(56.3^{\circ}\) відходить від горизонталі.
Знайдіть складові вектора \(\vec{v}\)з початковою точкою\((3,2)\) та кінцевою точкою\((7,4)\).
Рішення
Спочатку знайдіть стандартне положення.
\[\begin{align*} v &= ⟨7−3,4−2⟩ \\[4pt] &= ⟨4,2⟩ \end{align*}\]
Дивіться ілюстрацію на рис\(\PageIndex{14}\).
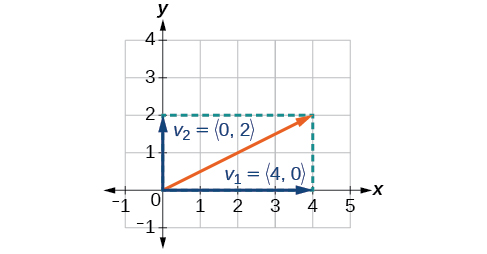
Малюнок\(\PageIndex{14}\)
Горизонтальна складова є\(\vec{v_1}=⟨4,0⟩\) і вертикальна складова\(\vec{v_2}=⟨0,2⟩\).
Знаходження вектора одиниці в напрямку\(v\)
Крім пошуку компонентів вектора, також корисно при вирішенні задач знайти вектор в тому ж напрямку, що і заданий вектор, але величини\(1\). Ми називаємо вектор з величиною\(1\) одиничного вектора. Потім ми можемо зберегти напрямок вихідного вектора, спрощуючи обчислення.
Одиничні вектори визначаються за складовими. Горизонтальний одиничний вектор записується як\(\vec{i}=⟨1,0⟩\) і спрямований вздовж позитивної горизонтальної осі. Вертикальний одиничний вектор записується як\(\vec{j}=⟨0,1⟩\) і спрямований вздовж позитивної вертикальної осі. Див\(\PageIndex{15}\). Малюнок.
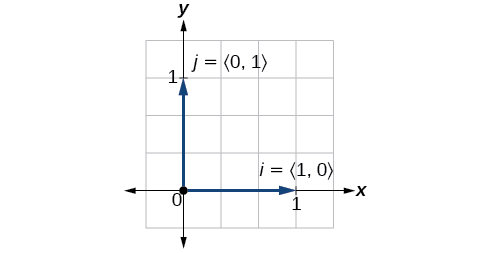
Малюнок\(\PageIndex{15}\)
Якщо \(\vec{v}\)є ненульовим вектором, то\(\dfrac{v}{| v |}\) є одиничним вектором у напрямку \(v\). Будь-який вектор, розділений на його величину, є одиничним вектором. Зверніть увагу, що величина завжди скалярна, а ділення на скаляр - це те саме, що множення на зворотне скаляра.
Знайдіть одиничний вектор в тому ж напрямку, що і\(v=⟨−5,12⟩\).
Рішення
Спочатку знайдемо величину.
\[\begin{align*} |v| &= \sqrt{{(−5)}^2+{(12)}^2} \\[4pt] &= \sqrt{25+144} \\[4pt] &=\sqrt{169} \\[4pt] &= 13 \end{align*}\]
Потім ми ділимо кожен компонент на\(| v |\), який дає одиничний вектор в тому ж напрямку, що і\(\vec{v}\):
\(\dfrac{v}{| v |} = −\dfrac{5}{13}i+\dfrac{12}{13}j \)
або, у складовій формі
\(\dfrac{v}{| v |}= \left \langle -\dfrac{5}{13},\dfrac{12}{13} \right \rangle\)
Див\(\PageIndex{16}\). Малюнок.
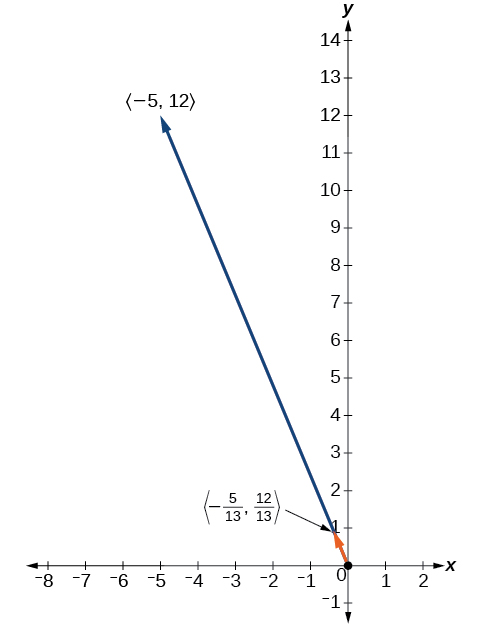
Малюнок\(\PageIndex{16}\)
Переконайтеся, що величина вектора одиниці дорівнює\(1\). Величина\(−\dfrac{5}{13}i+\dfrac{12}{13}j\) задається як
\[\begin{align*} \sqrt{ {\left(−\dfrac{5}{13}\right)}^2+{ \left(\dfrac{12}{13}\right) }^2 } &= \sqrt{\dfrac{25}{169}+\dfrac{144}{169}} \\[4pt] &= \sqrt{\dfrac{169}{169}}\\ &=1 \end{align*}\]
Вектор\(u=\dfrac{5}{13}i+\dfrac{12}{13}j\) - це одиничний вектор в тому ж напрямку, що і\(v=⟨−5,12⟩\).
Виконання операцій з векторами в терміні\(i\) і\(j\)
Поки що ми досліджували основи векторів: величину і напрямок, додавання і віднімання векторів, скалярне множення, складові векторів, геометричне подання векторів. Тепер, коли ми знайомі з загальними стратегіями, які використовуються в роботі з векторами, ми будемо представляти вектори в прямокутних координатах через\(i\) і\(j\).
Задано вектор\(\vec{v}\) з початковою точкою\(P=(x_1,y_1)\) та кінцевою точкою\(Q=(x_2,y_2)\),\(\vec{v}\) записується як
\[v=(x_2−x_1)i+(y_1−y_2)j\]
Вектор положення від\((0,0)\) до\((a,b)\), де\((x_2−x_1)=a\) і\((y_2−y_1)=b\), записується як\(\vec{v} = \vec{ai}+ \vec{bj}\). Ця векторна сума називається лінійною комбінацією векторів\(\vec{i}\) і\(\vec{j}\).
Величина\(\vec{v} = \overrightarrow{ai} + \overrightarrow{bj}\) задається як\(| v |=\sqrt{a^2+b^2}\). Див\(\PageIndex{17}\). Малюнок.
.jpg)
Малюнок\(\PageIndex{17}\)
Задано вектор\(\vec{v}\) з початковою точкою\(P=(2,−6)\) і кінцевою точкою\(Q=(−6,6)\), запишіть вектор через\(\vec{i}\) і\(\vec{j}\).
Рішення
Почніть з написання загальної форми вектора. Потім замініть координати заданими значеннями.
\[\begin{align*} v &= (x_2−x_1)i+(y_2−y_1)j \\[4pt] &=(−6−2)i+(6−(−6))j \\[4pt] &= −8i+12j \end{align*}\]
Задано початкову точку\(P_1=(−1,3)\) та\(P_2=(2,7)\) кінцеву точку, запишіть вектор\(\vec{v}\) через\(\vec{i}\) і\(\vec{j}\).
Рішення
Почніть з написання загальної форми вектора. Потім замініть координати заданими значеннями.
\[\begin{align*} v &= (x_2−x_1)i+(y_2−y_1)j \\[4pt] v &= (2−(−1))i+(7−3)j \\[4pt] &= 3i+4j \end{align*}\]
Запишіть вектор\(\vec{u}\) з початковою точкою\(P=(−1,6)\) та кінцевою точкою\(Q=(7,−5)\) через\(\vec{i}\) і\(\vec{j}\).
- Відповідь
-
\(u=8i−11j\)
Виконання операцій над векторами в терміні\(i\) і\(j\)
Коли вектори записуються через\(i\) і\(j\), ми можемо здійснювати додавання, віднімання і скалярне множення, виконуючи операції над відповідними компонентами.
Дано\(v = ai + bj\) і\(u = ci + dj\), потім
\[\begin{align*} v+u &= (a+c)i+(b+d)j \\[4pt] v−u &= (a−c)i+(b−d)j \end{align*}\]
Знайти суму\(v_1=2i−3j\) і\(v_2=4i+5j\).
Рішення
\[\begin{align*} v_1+v_2 &= (2+4)i+(−3+5)j \\[4pt] &= 6i+2j \end{align*}\]
Обчислення складової форми вектора: напрямок
Ми бачили, як малювати вектори відповідно до їх початкової та кінцевої точок та як знайти вектор положення. Ми також розглянули позначення векторів, намальованих конкретно в декартовій координатній площині з використанням\(i\) і\(j\). Для будь-якого з цих векторів ми можемо обчислити величину. Тепер ми хочемо об'єднати ключові моменти, і дивитися далі на ідеї масштабу і напрямки.
Обчислення напрямку відбувається за тим самим простим процесом, який ми використовували для полярних координат. Знаходимо напрямок вектора, знайшовши кут до горизонталі. Ми робимо це за допомогою базових тригонометричних ідентичностей, але з\(| v |\) заміною\(r\).
Враховуючи вектор положення\(v=⟨x,y⟩\) та кут напряму\(\theta\),
\[ \begin{align*} \cos \theta &= \dfrac{x}{|v|} \text{ and } \sin \theta=y|v| \\[4pt] x &= |v| \cos \theta \\[4pt] y &= |v| \sin \theta \end{align*}\]
Таким чином\(v=xi+yj=| v | \cos \theta i+| v | \sin \theta j\), і величина виражається як\(| v |=\sqrt{x^2+y^2}\).
Запишіть вектор довжиною\(7\) під кутом\(135°\) до позитивної осі x через величину і напрямок.
Рішення
Використовуючи формули перетворення\(x=| v | \cos \theta i\) і\(y=| v | \sin \theta j\), ми знаходимо, що
\[ \begin{align*} x &= 7\cos(135°)i \\[4pt] &= −\dfrac{7\sqrt{2}}{2} \\[4pt] y &=7 \sin(135°)j \\[4pt] &= \dfrac{7\sqrt{2}}{2} \end{align*}\]
Цей вектор може бути записаний як\(v=7\cos(135°)i+7\sin(135°)j\) або спрощений як
\(v=−\dfrac{7\sqrt{2}}{2}i+\dfrac{7\sqrt{2}}{2}j\)
Вектор рухається від початку до точки\((3,5)\). Запишіть вектор через величину і напрямок.
- Відповідь
-
\(v=\sqrt{34}\cos(59°)i+\sqrt{34}\sin(59°)j\)
Величина =\(34\)
\(\theta={\tan}^{−1}\left(\dfrac{5}{3}\right)=59.04°\)
Пошук точкового добутку двох векторів
Як ми обговорювали раніше в розділі, скалярне множення передбачає множення вектора на скаляр, а результат - вектор. Як ми бачили, множення вектора на число називається скалярним множенням. Якщо помножити вектор на вектор, є дві можливості: точковий добуток і перехресний добуток. Ми розглянемо лише крапковий добуток тут; ви можете зіткнутися з перехресним продуктом у більш просунутих курсах математики.
Точковий добуток двох векторів передбачає множення двох векторів разом, і результат - скаляр.
Точковий добуток двох векторів\(v=⟨a,b⟩\) і\(u=⟨c,d⟩\) є сумою добутку горизонтальних складових і добутку вертикальних складових.
\[v⋅u=ac+bd\]
Щоб знайти кут між двома векторами, скористайтеся формулою нижче.
\[\cos \theta=\dfrac{v}{| v |}⋅\dfrac{u}{| u |}\]
Знайдіть точковий добуток\(v=⟨5,12⟩\) і\(u=⟨−3,4⟩\).
Рішення
Використовуючи формулу, ми маємо
\[\begin{align*} v⋅u &= ⟨5,12⟩⋅⟨−3,4⟩ \\[4pt] &= 5⋅(−3)+12⋅4 \\[4pt] &= −15+48 \\[4pt] &= 33 \end{align*}\]
Знайдіть точковий добуток\(v_1 = 5i + 2j\) і\(v_2 = 3i + 7j\). Потім знайдіть кут між двома векторами.
Рішення
Знайшовши точковий добуток, множимо відповідні складові.
\[ \begin{align*} v_1⋅v_2 &= ⟨5,2⟩⋅⟨3,7⟩ \\[4pt] &= 5⋅3+2⋅7 \\[4pt] &= 15+14 \\[4pt] &= 29 \end{align*}\]
Щоб знайти кут між ними, скористаємося формулою\(\cos \theta=\dfrac{v}{|v|}⋅\dfrac{u}{|u|}\).
\[\begin{align*} \dfrac{v}{|v|}\cdot \dfrac{u}{|u|} &= \left \langle \dfrac{5}{\sqrt{29}}+\dfrac{2}{\sqrt{29}} \right \rangle \cdot \left \langle \dfrac{3}{\sqrt{58}}+\dfrac{7}{\sqrt{58}} \right \rangle \\[4pt] &=\dfrac{5}{\sqrt{29}}\cdot \dfrac{3}{\sqrt{58}}+\dfrac{2}{\sqrt{29}}\cdot \dfrac{7}{\sqrt{58}} \\[4pt] &= \dfrac{15}{\sqrt{1682}}+\dfrac{14}{\sqrt{1682}}\\ &=\dfrac{29}{\sqrt{1682}} \\[4pt] &= 0.707107 \\[4pt] {\cos}^{-1}(0.707107) &= 45° \end{align*}\]
Див\(\PageIndex{18}\). Малюнок.
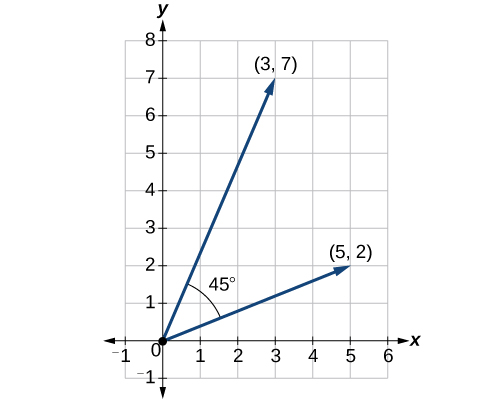
Малюнок\(\PageIndex{18}\)
Знайти кут між\(u=⟨−3,4⟩\) і\(v=⟨5,12⟩\).
Рішення
Використовуючи формулу, ми маємо
\[\begin{align*} \theta &= {\cos}^{−1}\left(\dfrac{u}{|u|}⋅\dfrac{v}{|v|}\right) \\[4pt] \left(\dfrac{u}{|u|}⋅\dfrac{v}{|v|}\right) &= \dfrac{−3i+4j}{5}⋅\dfrac{5i+12j}{13} \\[4pt] &= \left(− \dfrac{3}{5}⋅ \dfrac{5}{13}\right)+\left(\dfrac{4}{5}⋅ \dfrac{12}{13}\right) \\[4pt] &= −\dfrac{15}{65}+\dfrac{48}{65} \\[4pt] &= \dfrac{33}{65} \\[4pt] \theta &= {\cos}^{−1}\left(\dfrac{33}{65}\right) \\[4pt] &= 59.5^{\circ} \end{align*}\]
Див\(\PageIndex{19}\). Малюнок.
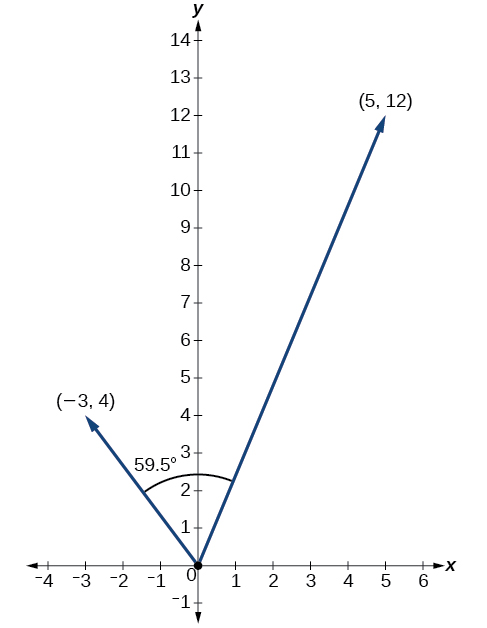
Малюнок\(\PageIndex{19}\)
Тепер у нас є інструменти для вирішення проблеми, яку ми представили при відкритті розділу.
Літак летить зі швидкістю польоту\(200\) миль на годину на чолі на підшипнику SE\(140°\). Північний вітер (з півночі на південь) дме зі швидкістю\(16.2\) миль на годину. Що таке швидкість землі і фактичний підшипник літака? Див\(\PageIndex{20}\). Малюнок.
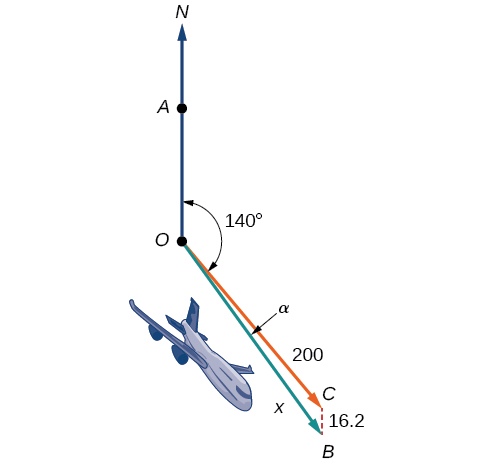
Малюнок\(\PageIndex{20}\)
Рішення
Швидкість заземлення представлена\(x\) на схемі, і нам потрібно знайти кут,\(\alpha\) щоб розрахувати відрегульований підшипник, який буде\(140°+\alpha\).
Зверніть увагу на малюнку\(\PageIndex{20}\), що кут\(\angle BCO\) повинен дорівнювати куту\(\angle AOC\) за правилом чергування внутрішніх кутів, тому кут\(\angle BCO\) дорівнює 140°. Ми можемо знайти\(x\) за законом косинусів:
\[\begin{align*} x^2 &= {(16.2)}^2+{(200)}^2−2(16.2)(200) \cos(140°) \\[4pt] x^2 &= 45,226.41 \\[4pt] x &= \sqrt{45,226.41} \\[4pt] x &= 212.7 \end{align*}\]
Наземна швидкість становить приблизно\(213\) милі на годину. Тепер ми можемо обчислити підшипник, використовуючи Закон Синеса.
\[\begin{align*} \dfrac{\sin \alpha}{16.2} &= \dfrac{\sin(140°)}{212.7} \\[4pt] \sin \alpha &= \dfrac{16.2 \sin(140°)}{212.7} \\[4pt] &=0.04896 \\[4pt] {\sin}^{−1}(0.04896) &= 2.8° \end{align*}\]
Тому площина має підшипник SE\(140°+2.8°=142.8°\). Наземна швидкість -\(212.7\) милі на годину.
Ключові концепції
- Вектор положення має свою початкову точку в початковій точці. Див\(\PageIndex{1}\). Приклад.
- Якщо вектор положення однаковий для двох векторів, вони рівні. Див\(\PageIndex{2}\). Приклад.
- Вектори визначаються їх величиною і напрямком. Див\(\PageIndex{3}\). Приклад.
- Якщо два вектора мають однакову величину і напрямок, вони рівні. Див\(\PageIndex{4}\). Приклад.
- Додавання та віднімання векторів призводять до нового вектора, знайденого шляхом додавання або віднімання відповідних елементів. Див\(\PageIndex{5}\). Приклад.
- Скалярне множення - це множення вектора на константу. Змінюється лише величина; напрямок залишається незмінним. Див. Приклад\(\PageIndex{6}\) і Приклад\(\PageIndex{7}\).
- Вектори складаються з двох компонентів: горизонтальної складової вздовж позитивної\(x\) осі та вертикальної складової вздовж позитивної\(y\) -осі. Див\(\PageIndex{8}\). Приклад.
- Одиничний вектор в тому ж напрямку будь-якого ненульового вектора знаходить діленням вектора на його величину.
- Величина вектора в прямокутній системі координат дорівнює\(| v |=\sqrt{a^2+b^2}\). Див\(\PageIndex{9}\). Приклад.
- У прямокутній системі координат одиничні вектори можуть бути представлені через\(ii\) і\(jj\) де\(i\) представляє горизонтальну складову і\(j\) представляє вертикальну складову. Потім,\(v = ai + bj\) є скалярним кратним\(v\) дійсними числами\(a\) і\(b\). Див. Приклад\(\PageIndex{10}\) і Приклад\(\PageIndex{11}\).
- Додавання і віднімання векторів через\(i\) і\(j\) складається з додавання або віднімання відповідних коефіцієнтів\(i\) і відповідних коефіцієнтів\(j\). Див\(\PageIndex{12}\). Приклад.
- Вектор\(v = ai + bj\) записується через величину і напрямок як\(v=| v |\cos \theta i+| v |\sin \theta j\). Див\(\PageIndex{13}\). Приклад.
- Точковий добуток двох векторів - добуток\(i\) термінів плюс добуток\(j\) термінів. Див\(\PageIndex{14}\). Приклад.
- Ми можемо використовувати точковий добуток, щоб знайти кут між двома векторами. Приклад\(\PageIndex{15}\) і приклад\(\PageIndex{16}\).
- Точкові продукти корисні для багатьох типів додатків фізики. Див\(\PageIndex{17}\). Приклад.