7.6: Теорема Кастільяно
- Page ID
- 32844

Ця теорема застосовується до статично визначеним структурам і системі, що піддаються зосередженим силам або моментам. Розподіл згинальних моментів можна однозначно визначити з глобальної рівноваги як функції сил,\(U = U(P)\). Загальна потенційна енергія
\[\prod = U(P) − P w_o\]
Для заданої амплітуди\(w_o\) відхилення величину навантаження регулюють себе таким чином, щоб загальна потенційна енергія була нерухомою. Математично
\[\delta [\prod (P)] = \delta [U(P) − P w_o] = \frac{dU}{dP} \delta P − w_o \delta P = \left[ \frac{dU(P)}{dP} − w_o \right] \delta P = 0\]
Доведено, що зміщення під силою в напрямку сили дорівнює похідній пружної енергії, що зберігається по відношенню до сили.
Для того щоб інтерпретувати стаціонарне властивість\(\prod\), розглянемо консольну балку з силою\(P\) на її кінчику. Розподіл згинального моменту є\(M(x) = P(l − x)\). Давайте виберемо формулювання сили загальної потенційної енергії, Рівняння (?? ). Загальна потенційна енергія
\[[\prod = \frac{P^2}{2EI} \int_{0}^{l} (l − x)^2 dx − P w_o \label{8.49}\]
Після інтеграції
\[\prod(P) = P \left( \frac{Pl^3}{6EI} − w_o \right) \]
Графік цієї функції показаний на рис. (\(\PageIndex{1}\)).
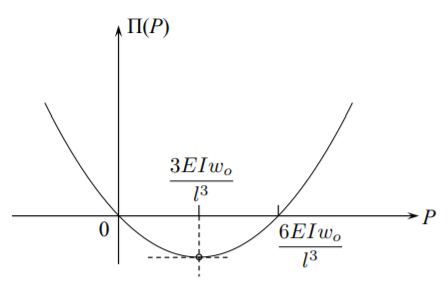
Парабола має два\(P_1 = 0\) корені в і в\(P_2 = \frac{6EIw_o}{l^3}\). Стаціонарна точка знаходиться в
\[P = \frac{3EIw_o}{l^3} \label{8.51}\]
що є точним рішенням проблеми.
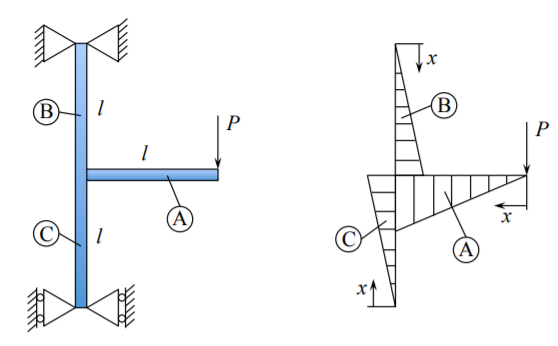
В якості ілюстрації розглянемо дві прості структурні системи. Перша система з двох балок показана на малюнку (\(\PageIndex{2}\)).
Ця проблема вирішувалася раніше за допомогою переміщень і безперервності нахилу. Випливає набагато просте рішення. Розподіли згинального моменту
\[\text{ Beam (A) } \; M(x) = −P x \; 0 < x < l \\ \text{ Beam (B) } \; M(x) = \frac{1}{2} P x \; 0 < x < l \\ \text{ Beam (C) } \; M(x) = − \frac{1}{2} P x \; 0 < x < l \]
Енергія деформації вигину становить
\[U(P) = \int_{0}^{l} \frac{1}{2EI} \left[ P^2 + \left(\frac{P}{2}\right)^2 + \left(\frac{P}{2}\right)^2 \right] x^2 dx = \frac{3}{2} P^2 \frac{l^3}{3} = \frac{1}{2} P^2 l^3 \]
З відносного внеску трьох балок у Рівнянні (7.5.13) видно, що горизонтальна консоль вдвічі сприяє відхиленню наконечника порівняно з вертикальною балкою.
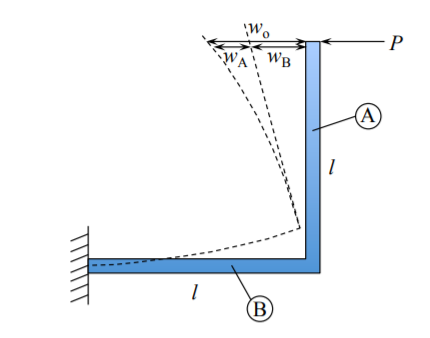
Друга система складається з ліктя. З малюнка (\(\PageIndex{3}\)) розподіл згинального моменту дорівнює
\[\text{ Beam (A) } \; M(x) = P x \\ \text{ Beam (B) } \; M(x) = Pl \]
Енергія пружного вигину системи становить
\[U(P) = \frac{1}{2EI} \int_{0}^{l} (P x)^2 dx + \frac{1}{2EI} \int_{0}^{l} (P l)^2 dx = \frac{P^2}{2EI} \frac{4l^3}{3} \]
Загальний прогин у напрямку сили дорівнює
\[w_o = \frac{dU}{dP} = \frac{4}{3} \frac{Pl^3}{EI} \]
Доказ теореми Кастільяно для системи точкових навантажень,\(P_i\)
Відповідні зсуви позначаються\(w_i\), див. Малюнок (\(\PageIndex{4}\)).
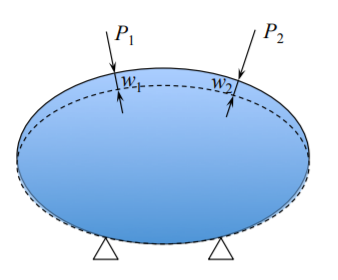
Робота зовнішніх сил - це
\[W = \sum_{i} P_iw_i = P_iw_i \]
Передбачається, що накопичена енергія може бути виражена в перерахунку на всі точкові сили,\(U = U(P_i)\). Давайте збережемо всі точкові сили на фіксованих значеннях і варіюємо лише один, скажімо\(P_k\). Для рівноваги сумарна потенційна енергія системи повинна бути нерухомою щодо цієї зміни. Таким чином,
\[\delta \prod = \delta (U - W) = \frac{dU}{dP_k} \delta P_k − w_k \delta P_k \\ = \left( \frac{dU}{dP_k} − w_k \right) \delta P_k = 0\]
Розширена теорема Кастільяно
\[w_k = \frac{\partial U(P_i)}{\partial P_k} \]
Наприклад, якщо застосовуються дві точкові навантаження,
\[w_2 = \frac{\partial U(P_1, P_2)}{\partial P_2} \]
Зазвичай теорема Кастільяно дає лише прогин у заданій точці, але не відхилену форму. Розширена теорема може бути використана для прогнозування відхиленої форми.
Ілюстрація
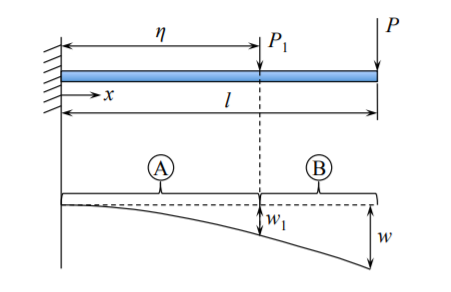
Розглянемо консольну балку, навантажену двома точковими силами. Одна сила\(P\) прикладається на кінчику, а інша сила\(P_1\) діє на відстані\(\eta\) від опори.
Розподіл згинального моменту
\[\begin{array}{lcl} M_A(x) = P(l − x) + P_1(\eta − x) & \text{ for } & 0 < x < \eta \\ M_B(x) = P(l − x) & \text{ for } & \eta< x < l \end{array}\]
Енергія деформації вигину становить
\[U(P, P_1) = \frac{1}{2EI} \int_{0}^{\eta} M^2_{A} dx + \frac{1}{2EI} \int_{\eta}^{l} M^2_B dx \]
Згідно з рівнянням\ ref {8.49}, прогин під точковим навантаженням\(P_1\) дорівнює
\[w_1 = \frac{\partial U(P, P_1)}{\partial P_1} = \frac{1}{EI} \int_{0}^{\eta} M_A \frac{\partial M_A}{\partial P_1} dx + \frac{1}{EI} \int_{\eta}^{l} M_B \frac{\partial M_B}{\partial P_1} dx\]
Похідними згинальних моментів є
\[\frac{\partial M_A}{\partial P_1} = \eta − x \]
\[\frac{\partial M_B}{\partial P_1} = 0 \]
Підставляючи рівняння\ ref {8.51} і (?? ) в (?? ), один отримує
\[w_1 = \frac{1}{EI} \int_{0}^{\eta} [P(l − x) + P_1(\eta − x)](\eta − x) dx \]
Це рівняння справедливо для будь-якої комбінації\(P\) і\(P_1\). Тому ми можемо припустити, що\(P_1\) це «фіктивна» сила і може бути встановлена рівною нулю. Тоді рівняння (?? ) зводить до
\[w_1 = \frac{1}{EI} \int_{0}^{\eta} [P(l − x)(\eta − x) dx \]
який дає, після інтеграції,
\[w_1(\eta) = \frac{Pl^3}{3EI} \left[ \frac{3}{2} \left(\frac{\eta}{l}\right)^2 − \frac{1}{2} \left(\frac{\eta}{l}\right)^3 \right] \]
У наведеному вище розчині\(\eta\) знаходиться довільне положення уздовж балки і\(w_1(\eta)\) є відповідним прогином. Змінюючи змінні
\[\eta \rightarrow x \\ w_1(\eta) = w(x) \]
ми можемо відновити точну відхилену форму консольної балки
\[w_1(\eta) = \frac{Pl^3}{3EI} \left[ \frac{3}{2} \left(\frac{x}{l}\right)^2 − \frac{1}{2} \left(\frac{x}{l}\right)^3 \right] \]
Наведений вище приклад проілюстрував велику гнучкість методу Кастільяно у вирішенні статично визначених задач.