7.1: Поняття потенційної енергії
- Page ID
- 32830

З фізики середньої школи ви повинні згадати два рівняння
\[E = \frac{1}{2} Mv^2 \quad \text{ kinematic energy}\]
\[W = mgH \quad \text{ potential energy} \]
де\(H\) - висота маси\(m\) від певного еталонного рівня\(H_o\), і\(g\) позначає прискорення землі. Контрольним рівнем може бути центр землі, рівень моря або будь-яка поверхня, від якої\(H\) вимірюється.
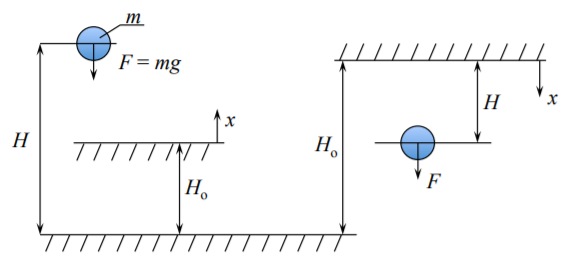
Ми рідко вимірюємо\(H\) від центру землі. Тому те, що ми можемо легко виміряти, - це зміна потенційної енергії.
\[\Delta W = (mg)(H − H_o) \label{7.1.3}\]
Енергія завжди позитивна. Він може бути нульовим, але не може бути негативним. Сила тяжіння\(F = mg\) спрямована до центру землі. Тому виникає необхідність у від'ємному знаку в Equation\ ref {7.1.3}). У системі координат Figure (\(\PageIndex{1}\)) сила тяжіння негативна (протилежна сенсу координати\(x\)). Сила\(F\) діє в сенсі,\(x\) але\(H − H_o\) різниця негативна.
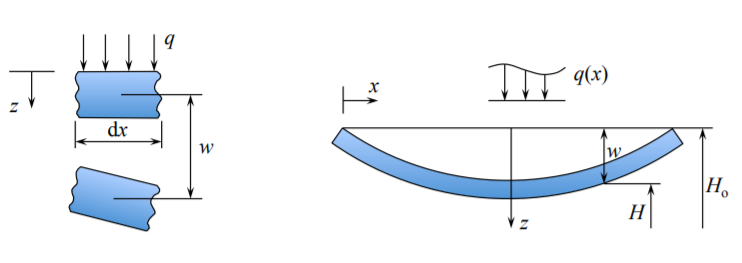
Розширюючи поняття потенційної енергії до променя, сила є\(F = q dx\) і\(w = H − H_o\) є прогин променя.
\[W \equiv + \int_{0}^{l} qw dx \]
Аналогічним виразом для пластин є
\[W \equiv + \int_{S} pw ds \]
У вищенаведеному визначенні\(W\) негативний.
Поняття енергії, що зберігається пружно,\(U\) було введено раніше. Для 3-D тіла
\[U = \int_{V} \frac{1}{2} \sigma_{ij}\epsilon_{ij} dv \]
і для пучка
\[U = \int_{0}^{l} \frac{1}{2} MK dx + \int_{0}^{l} \frac{1}{2} N \epsilon^{\circ} dx \]
Для пластин енергії вигину і мембрани задаються рівняннями (3.6.25), (3.6.26) і (3.6.41), (3.6.42).
Загальна потенційна енергія\(\prod\) - це нове поняття, і воно визначається як сума енергії стоку і потенційної енергії
\[\prod = U + (−W) = U − W \]
Враховуйте на час, що матеріал жорсткий, для чого\(U \equiv 0\). Уявіть собі жорстку кульку, зміщену на нескінченно малу величину на плоскій\((\theta = 0)\) і похилій\((\theta \neq 0)\) поверхні, Рисунок (\(\PageIndex{3}\)).
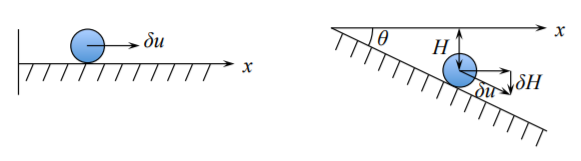
У нас є\(H = u \sin \theta\) і\(\delta H = \delta u \sin \theta\). Загальна потенційна енергія і її зміна
\[\prod = −W = −F u \sin \theta \]
\[\delta \prod = −\delta W = −(F \sin \theta) \delta u \]
На рівній поверхні\(\theta = 0\) і\(\delta \prod = 0\), і куля знаходиться в статичному (нейтральному) рівновазі. Якщо\(\theta > 0\),\(\delta \prod \neq 0\) і куля не знаходиться в статичній рівновазі. Зверніть увагу, що якщо додається сила інерції д'Аламбера в напрямку руху, м'яч все одно буде знаходитися в динамічній рівновазі. У цій лекції розглядається тільки статична рівновага. Тепер ми можемо розширити вищевказаний тест на рівновагу і ввести наступний принцип:
Система, як кажуть, знаходиться в рівновазі, якщо нескінченно мала зміна\(a\) аргументу загальної потенційної енергії\(\prod = \prod(a)\) не змінює загальну потенційну енергію
\[\delta \prod (a) = \frac{\partial \prod}{\partial a} \delta a = 0 \]
Оскільки\(\delta a \neq 0\) (\(\delta a = 0\)це банальний випадок, в якому не проводиться жодна перевірка на рівновагу) необхідною і достатньою умовою стійкості є
\[\frac{\partial \prod}{\partial a} = 0\]
У разі, коли функціонал\(\prod\) є функцією багатьох (скажімо\(N\)) змінних\(\prod = \prod(a_i)\), збільшення
\[\delta \prod = \frac{\partial \prod}{\partial a_i} \delta a_i, \quad i = 1, \dots, N\]
Система знаходиться в рівновазі, якщо похідна по відношенню до кожної змінної в той час зникає\(\prod\)
\[\frac{\partial \prod (a_i)}{\partial a_i} = 0, \quad i = 1, \dots, N \]
Значення аргументу (ів)\(a_i\) або незалежних змінних буде пояснено далі.