3.1: Статичний контролер зворотного зв'язку





Система управління зворотним зв'язком
Стандартна блок-схема системи управління зворотним зв'язком з одним входом (SISO) включає установкуG(s), контролерK(s), і датчикH(s), деH(s)=1 часто передбачається.
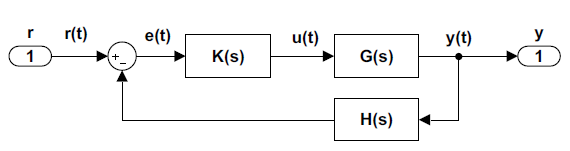
Загальна функція передачі системи від входуr(t), до виходуy(t), може бути отримана, враховуючи сигнал помилки,e=r−Hy=r−KGHe. Таким чином,(1+KGH)e=r.
НехайL(s)=KGH(s) позначають посилення зворотного зв'язку петлі; потім,(1+L)e=r.
Функція передачі помилок відr доe виходить у вигляді:S(s)=11+L(s)=11+KGH(s)
Функція передачі замкнутого циклу відr доy виходить у вигляді:T(s)=KG(s)1+KGH(s)
Відзначимо, що:S(s)+T(s)=1.
Статична конструкція контролера петлі
Статичний контролер позначає використання підсилювача з коефіцієнтом посилення,K, для генерації входу на установку,G(s). Дія контролера представлена у вигляді:u=Ke, деe представляє сигнал помилки іu є введенням рослини.

ПрипускаючиH(s)=1, що функція передачі із замкнутим циклом задається як:
y(s)r(s)=T(s)=KG(s)1+KG(s)
НехайG(s)=n(s)d(s); потім, функція передачі замкнутого циклу виходить у вигляді:
y(s)r(s)=Kn(s)d(s)+Kn(s)
Характеристичний многочлен із замкнутим контуром визначається як:Δ(s,K)=d(s)+Kn(s).
З точки зору проектування контролера коефіцієнт посиленняK може бути обраний для досягнення бажаних місць розташування коренів для характеристичного полінома із замкнутим контуром. Конструкція може бути виконана шляхом порівняння коефіцієнтів характеристичного многочлена з потрібним характеристичним поліномом.
Приклад3.1.1
Модель для системи екологічного контролю наведено у вигляді:G(s)=120s+1.
Припускаючи статичний регулятор посилення, характеристичний поліном із замкнутим контуром виходить як:Δ(s,K)=20s+1+K.
Припустимо, потрібний характеристичний многочлен вибирається як:Δdes(s)=4(5s+1). Потім, порівнявши коефіцієнти, отримаємо статичний контролер як:K=3.
Приклад3.1.2
Модель системи управління позицією наведено у вигляді:G(s)=1s(0.1s+1).
Припускаючи статичний регулятор посилення, характеристичний многочлен виходить у вигляді:Δ(s,K)=s(0.1s+1)+K.
Припустимо, потрібний характеристичний многочлен вибирається як:Δdes(s)=0.1(s2+10s+50). Потім, порівнявши коефіцієнти, отримаємо статичний контролер як:K=5.