8.2: Умова Trefftz для стабільності
- Page ID
- 32953

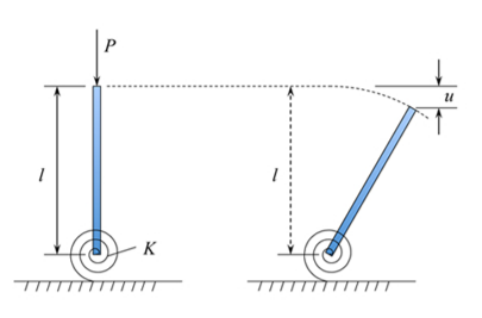
У 1933 році німецький вчений Еріх Треффц запропонував енергетичний критерій для визначення стійкості пружних структур. Цей критерій ми пояснимо на простому прикладі структури з одним ступенем свободи. Розглянемо жорстку колону вільну з одного кінця і шарнірну на іншому. На шарнірі встановлена пружина кручення. При повороті на кут\(\theta\) у шарніра розвивається згинальний момент, що чинить опір руху
\[M = K \theta\]
де\(K\) - постійна обертальної пружини. Колона спочатку знаходиться у вертикальному положенні і навантажується стискає навантаженням\(P\), рис. (\(\PageIndex{1}\)). У деформованої конфігурації\(P\) сила робить роботу над зміщенням\(u\)
\[u = l(1 − \cos \theta) \cong l \frac{\theta^2}{2} \label{8.2.2}\]
Сумарна потенційна енергія системи дорівнює
\[\prod = \frac{1}{2} M \theta − P u = \frac{1}{2} K \theta^2 − \frac{1}{2} Pl \theta^2 \]
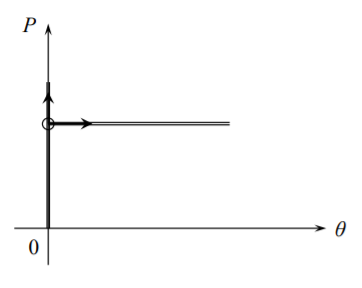
При застосуванні навантаження колона, звичайно, жорстка і залишається прямо до критичної точки\(P = P_c\). Шляхом\(\theta = 0\) називають первинний шлях рівноваги. Якби колона була пружною, а не жорсткою, було б лише осьове стиснення уздовж цього шляху. Цей етап часто називають конфігурацією попереднього вигину. При критичному\(P_c\) навантаженні конструкція має два варіанти вибору. Він може продовжувати чинити опір силі\(P > P_c\) і залишатися прямим. Або він може роздвоїтися на сусідню конфігурацію і продовжувати обертатися з постійною силою. Точка біфуркації - точка вигину. Кажуть, що структура пряжкою від чисто стискаючої стадії до стадії комбінованого стиснення та згинання.
Вищевказаний аналіз показав, що при розгляді рівноваги з нелінійними геометричними термінами Equation\ ref {8.2.2} прогнозує два різні шляхи рівноваги і точку біфуркації (вигин). Давайте тепер трохи далі вивчимо поняття стійкості і обчислимо другу варіацію загальної потенційної енергії.
\[\delta^2 \prod = (K − Pl) \delta \theta \delta \theta \]
Графік нормованої другої варіації\(\delta^2 \prod / \delta \theta \delta \theta \) показаний на малюнку (\(\PageIndex{1}\)).
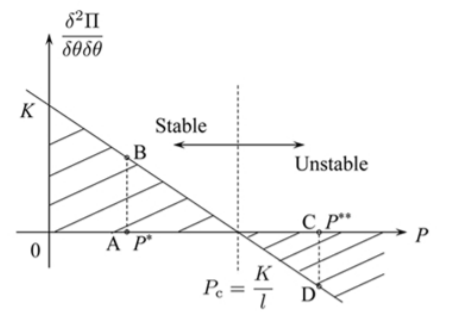
Видно, що в\(0 < P < P_c\) діапазоні друга варіація загальної потенційної енергії є позитивною. У діапазоні\(P > P_c\) ця функція є негативною. Перехід від стабільного до нестабільного поведінки відбувається при\(\delta^2 \prod = 0\). Тому зникнення другої варіації загальної потенційної енергії визначає точку структурної нестійкості або вигин.
Фізично тест на стійкість виглядає наступним чином. Доводимо силу стиснення до величини\(P^*\), ще нижче критичного навантаження. Потім ми застосовуємо невелике обертання\(\pm \delta\theta\) в будь-якому напрямку від площини вигину. Продукт завжди\(\delta\theta\delta\theta\) ненегативний.
Для рівноваги перша варіація загальної потенційної енергії повинна вигнати\(\delta\theta = 0\), що дає
\[(K − Pl) \theta \delta \theta = 0 \]
Існує два рішення вищевказаного рівняння, яке відповідає двом різним шляхам рівноваги:
- \(\theta = 0 - \text{ primary equilibrium path}\)
- \(P = P_c = \frac{K}{l} - \text{ secondary equilibrium path}\)
І так виглядає друга варіація загальної потенційної енергії (довжина АВ на рис. (\(\PageIndex{1}\))). Коли бічне навантаження, необхідне для зміщення колони на,\(\delta\theta\) звільняється, пружинна система повернеться в недеформоване, пряме положення.
Повторюємо той же тест під зусиллям стискання\(p^{**} > P_c\). Застосування нескінченно малого обертання\(\delta\theta\) зробить функцію\(\delta^2/\delta\theta\delta\theta\) негативною. Це діапазон нестабільної поведінки. При звільненні поперечної сили колона не повернеться у вертикальне положення, але залишиться в деформованої конфігурації. Слід зазначити, що вищесказаний аналіз стосується проблеми стійкості шляху первинної рівноваги. Вторинний шлях рівноваги стабільний, як буде показано нижче.
Для вираження загального потенціалу його можна побудувати з точним рівнянням для зміщення,\(u\) а не першим двохчасовим розширенням, Equation\ ref {8.2.2}
\[\prod = \frac{1}{2} K\theta^2 − lP(1 − \cos \theta) \]
Вторинний шлях рівноваги,\(\delta \prod = 0\) отриманий з
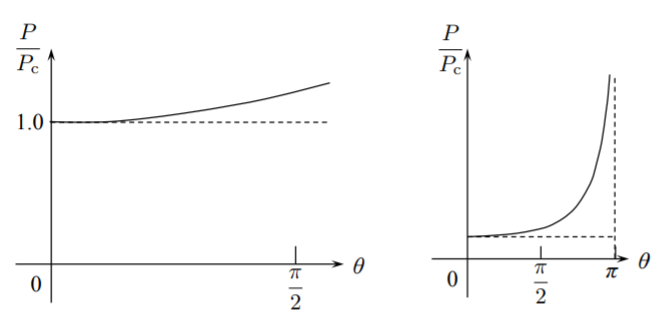
\[\frac{P}{P_c} = \frac{\theta}{\sin \theta}\]
Графік наведеної вище функції наведено на рисунку (\(\PageIndex{4}\)).
При малих значеннях обертання стовпця сила\(P\) майже постійна, як і передбачається двохтерміновим розширенням функції косинуса. При більших обертаннях опір колони збільшується разом з кутом\(\theta\). Така поведінка за своєю суттю стабільно. Сила монотонно збільшується і досягає нескінченності при\(\theta \rightarrow \pi\).