5.10: Радіолокаційні системи
- Page ID
- 30674

Радар використовує сигнали EM для визначення дальності, висоти, напрямку та швидкості об'єктів, які називаються цілями, дивлячись на сигнали, отримані від переданих сигналів, званих формами радіолокаційних хвиль. Загальні радіолокаційні діапазони і застосування наведені в табл\(\PageIndex{1}\). Найбільш раннє використання ЕМ-сигналів для виявлення цілей було продемонстровано в 1904 році Крістіаном Халсмейером за допомогою генератора іскрового розрядника [39]. Ця система просувалася як система уникнення зіткнень кораблів і виявляла напрямок тільки цілей. Дослідження сприяли подальшим розробкам, зі значним прискоренням під час Другої світової війни. Радар тепер це слово в своєму власному праві, але в 1941 році термін RADAR був створений як абревіатура для виявлення радіо і діапазону.
| Смуга | Частота | Довжина хвилі | Заявка |
|---|---|---|---|
| HF | \(3-30\text{ MHz}\) | \(10-100\text{ m}\) | Загоризонтний радар, океанографічне картографування |
| УКХ | \(30-300\text{ MHz}\) | \(1-10\text{ m}\) | Океанографічне картографування, моніторинг атмосфери, далекий пошук |
| УВЧ | \(0.3-1\text{ GHz}\) | \(1\text{ m}-30\text{ cm}\) | Дальнє спостереження, проникнення листя, проникнення ґрунту, атмосферний моніторинг |
| Л | \(1–2\text{ GHz}\) | \(15–30\text{ cm}\) | Супутникові знімки, картографування, дальнє спостереження, моніторинг навколишнього середовища |
| S | \(2-4\text{ GHz}\) | \(7.5–15\text{ cm}\) | Погодний радар, управління повітряним рухом, спостереження, пошук, IFF (ідентифікація, друг або ворог) |
| C | \(4–8\text{ GHz}\) | \(3.75–7.5\text{ cm}\) | Гідрологічний радар, топографія, управління вогнем, погода |
| Х | \(8–12\text{ GHz}\) | \(2.5–3.75\text{ cm}\) | Хмарний радар, шукач ракет повітря-повітря, морський, повітряна турбулентність, поліцейський радар, зображення високої роздільної здатності, спостереження за периметром |
| Ку | \(12–18\text{ GHz}\) | \(1.7–2.5\text{ cm}\) | Дистанційне зондування, управління вогнем ближньої дальності, спостереження за периметром; вимовляється «kay-you» |
| К | \(12=8–27\text{ GHz}\) | \(1.2–1.7\text{ cm}\) | Поліцейський радар, дистанційне зондування, нагляд за периметром |
| Ка | \(27–40\text{ GHz}\) | \(7.5–12\text{ mm}\) | Поліцейський радар, наведення зброї, дистанційне зондування, спостереження за периметром, наведення зброї; вимовляється «kay-a» |
| V | \(40–75\text{ GHz}\) | \(4–7.5\text{ mm}\) | Нагляд за периметром, дистанційне зондування, наведення зброї |
| Ш | \(75-110\text{ GHz}\) | \(2.7-4\text{ mm}\) | Нагляд за периметром, дистанційне зондування, наведення зброї |
Таблиця\(\PageIndex{1}\): радіолокаційні діапазони IEEE та застосування.
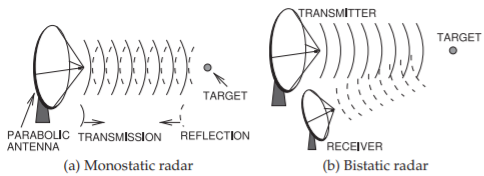
Малюнок\(\PageIndex{1}\): Радіолокаційна система: (а) моностатичний радар з однаковою ділянкою, що використовується для передачі радіолокаційного сигналу та отримання відбиття від цілі; і (б) бістатичний радар з різними ділянками передачі та прийому.
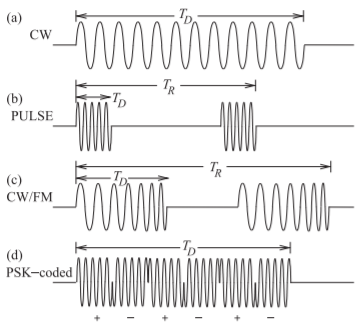
Малюнок\(\PageIndex{2}\): Радіолокаційні форми хвиль: (а) безперервна хвиля; (б) імпульсна хвиля; (c) частотно-модульована безперервна хвиля; і (d) фазово-кодована (кодована PSK) форма сигналу.
У радіолокаційній системі, як правило, антена з високим коефіцієнтом посилення, така як параболічна антена, використовується для передачі радіолокаційного сигналу, але завжди антена з високим коефіцієнтом посилення використовується для прийому сигналу. Якщо для передачі і прийому використовується одна і та ж антена (можливо дві аналогічні антени на одному майданчику), система називається моностатичним радаром\(\PageIndex{1}\) (див. Рис. Радар з передавальними і приймальними антенами на різних ділянках називається бістатичним радаром (показано на малюнку\(\PageIndex{1}\) (б)).
У моностатичному радарі, що використовує ту ж антену для передачі та прийому, простір забарвлюється радіолокаційним сигналом і прийнятий сигнал захоплюється після затримки поширення від антени до мети і назад знову. Потім може бути розроблено радіолокаційне зображення. У багатьох радарах приймальна антена механічно керується і часто використовується регулярне обертання. За допомогою так званих радарів із синтетичною апертурою така платформа, як літак, рухає радар в одному напрямку, а одновимірне механічне або електричне сканування дозволяє розробити двовимірне зображення.
Категорії радіолокаційних сигналів наведені на малюнку\(\PageIndex{2}\). Форма хвилі безперервної хвилі (CW), показана на малюнку\(\PageIndex{2}\) (а), знаходиться на весь або більшу частину часу і використовується для виявлення відбиття від цілі. Цей відбитий сигнал набагато менше, ніж переданий сигнал, і може бути важко розділити передані і прийняті сигнали. Моностатична архітектура радіолокатора CW показана на малюнку\(\PageIndex{3}\) (а), де циркулятор\(^{1}\) використовується для поділу переданих і прийнятих сигналів. Отриманий сигнал перетворюється в цифрову форму за допомогою
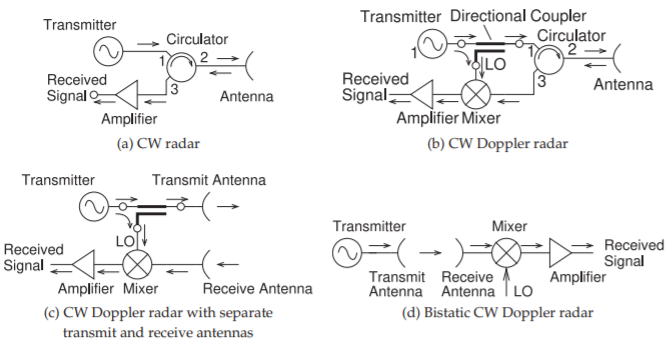
Малюнок\(\PageIndex{3}\): Радіолокаційні архітектури.
АЦП і пропускна здатність АЦП з необхідним динамічним діапазоном визначає межу по смузі пропускання радіолокаційного сигналу. Як правило, чим ширша пропускна здатність, тим краще радіолокаційна система ідентифікує об'єкти. Сигнал CW може бути використаний для розробки зображення, але він не є хорошим для визначення дальності цілі. Для цього краще підійде імпульсна радіолокаційна форма хвилі, як показано на малюнку\(\PageIndex{2}\) (б). Період повторення більше\(T_{R}\), ніж час в обидва кінці до цілі, таким чином, часовий інтервал між переданим сигналом і повернутим сигналом може бути використаний для оцінки діапазону. Напрямок визначається орієнтацією антени.
Архітектура CW також може використовуватися з імпульсним радаром. В імпульсному радарі отриманий сигнал містить потрібний цільовий сигнал, багатопроменевий і відлуння, а також безлад, як показано на малюнку\(\PageIndex{4}\) (а). Ці ефекти також з'являються в сигналі, отриманому в радіолокаторі CW, але це набагато легше побачити в імпульсному радарі. Визначення безладу та багатопроменевих ефектів є основною темою в радіолокаційній обробці. Альтернативні форми хвиль, особливо цифрово модульовані форми сигналу, допомагають у вилученні потрібної інформації. Частотно-модульована форма хвилі, або форма хвилі щебетання, на малюнку\(\PageIndex{2}\) (c), матиме відображення, яке також буде щебетати, а різниця між частотою, що передається, і отриманою вказує на діапазон цілі, за умови, що мета не рухається. Радіолокаційна архітектура, яка може бути використана для отримання цієї інформації, показана на малюнку\(\PageIndex{3}\) (b). Спрямовані ответвители відводять невелику частину сигналу передачі і використовують його як LO змішувача з прийнятим сигналом як вхід. Подібна архітектура показана на малюнку\(\PageIndex{3}\) (с), але тепер окремі передавальні та приймальні антени використовуються для розділення переданих і прийнятих сигналів, а не за допомогою циркулятора. Краще розділення переданих і прийнятих сигналів можна отримати таким чином. Частота ПЧ, що призводить, пропорційна діапазону цілі.
Важливою концепцією в радарі є те, що радіолокаційного перерізу (RCS) позначається\(\sigma\) (з одиницями СІ\(\text{m}^{2}\)). RCS цілі - це еквівалентна область, яка
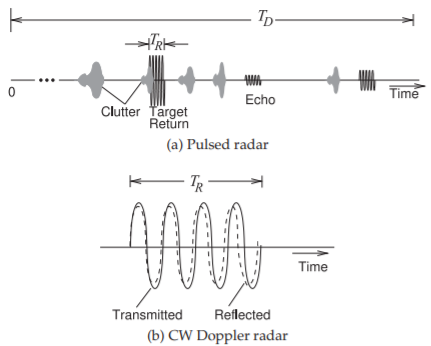
Малюнок\(PageIndex{4}\): Радар повертається. Сила відбитого сигналу залежить від перетину радіолокатора (РКС)\(\sigma\), цілі. \(\sigma = 0.01\text{ m}^{2}\)для птаха,\(< 0.1\text{ m}^{2}\) для літака-невидимки,\(1\text{ m}^{2}\) для людини,\(2– 6\text{ m}^{2}\) для звичайного винищувача,\(100\text{ m}^{2}\) для великого комерційного літака,\(200\text{ m}^{2}\) для вантажівки,\(10,000–100,000\text{ m}^{2}\) для контейнеровоза.
перехоплює потужність переданого сигналу і повторно випромінює всю цю потужність ізотропно для отримання спостережуваної щільності потужності у приймача [40]. Таким чином, RCS залежить від частоти переданого сигналу, розміру цілі, падаючого і відбитого кута сигналу, відбитого ціллю, і відбивної здатності цілі.
Потужність сигналу, відбитого ціллю і захопленого приймальною антеною, задається рівнянням радіолокатора [40]:
\[\label{eq:1}P_{R}=\frac{P_{T}G_{T}A_{R}\sigma F^{4}}{(4\pi )^{2}R_{T}^{2}R_{R}^{2}} \]
де потужність передачі, що\(P_{T}\) передається на передавальну антену,\(G_{T}\) є коефіцієнтом посилення антени передавача,\(A_{R}\) є ефективною площею діафрагми приймаючої антени,\(F\) є коефіцієнтом поширення малюнка,\(R_{T}\) це відстань від передавача до цілі, і \(R_{R}\)відстань від мети до приймача. \(F\)фіксує ефективні втрати за рахунок багатопроменевої, яка була зафіксована в комунікаціях шляхом введення сигнальної залежності\(1/d^{n}\), де\(n\) коливається від\(2\) до в\(4\) залежності від навколишнього середовища. У вільному просторі,\(F = 1\). Якщо для передачі і прийому використовується одна і та ж антена, а багатопроменева не важлива (так\(F = 1\)), то Рівняння\(\eqref{eq:1}\) стає
\[\label{eq:2}P_{R}=\frac{P_{T}G_{T}A_{R}\sigma}{(4\pi )^{2}R^{4}} \]
де\(R = R_{T} = R_{R}\). У розділі 4.5.4 ефективна область антени була пов'язана з коефіцієнтом посилення антени. З рівняння (4.5.14)
\[\label{eq:3}A_{R}=\frac{G_{r}\lambda^{2}}{4\pi} \]
і так, з\(G_{R} = G_{T}\), Рівняння\(\eqref{eq:2}\) стає
\[\label{eq:4}P_{R}=\frac{P_{T}G_{T}^{2}\lambda^{2}\sigma}{(4\pi)^{3}R^{4}} \]
| Частота радіолокатора,\(f_{T}\) | Відносна швидкість,\(v_{R}\) | ||
|---|---|---|---|
| \(1\text{ m/s}\) | \(100\text{ km/hr}\) | \(1000\text{ km/hr}\) | |
| \ (f_ {T}\) ">\(500\text{ MHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) «>\(3.3\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) «>\(92.6\text{ Hz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) «>\(925.9\text{ kHz}\) |
| \ (f_ {T}\) ">\(2\text{ GHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) «>\(13.3\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) «>\(370.4\text{ Hz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) «>\(3.704\text{ kHz}\) |
| \ (f_ {T}\) ">\(10\text{ GHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) «>\(66.7\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) «>\(1.852\text{ kHz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) «>\(18.519\text{ kHz}\) |
| \ (f_ {T}\) ">\(40\text{ GHz}\) | \ (v_ {R}\)\(1\text{ m/s}\) «>\(266.7\text{ Hz}\) | \ (v_ {R}\)\(100\text{ km/hr}\) «>\(7.407\text{ kHz}\) | \ (v_ {R}\)\(1000\text{ km/hr}\) «>\(74.074\text{ kHz}\) |
Таблиця\(\PageIndex{2}\): Зсуви доплерівської частоти для цілей, що рухаються до радара зі швидкістю\(v_{R}\).
Якщо сигнал частоти\(f_{T}\) передається і відбивається від рухомої мети, відбувається доплерівський зсув\(f_{D}\), і прийнятий сигнал буде на частоті
\[\label{eq:5}f_{R}=f_{T}+f_{D}\quad\text{(target moving toward the radar)} \]
\[\label{eq:6}f_{R}=f_{T}-f_{D}\quad\text{(target moving away from the radar)} \]
де
\[\label{eq:7}f_{D}=2v_{R}f_{T}/c \]
У Рівнянні\(\eqref{eq:6}\)\(v_{R}\) є радіальною складовою швидкості цілі щодо радара, і\(c\) є швидкість світла. Типові доплерівські зрушення наведені в табл\(\PageIndex{2}\).
Якщо мета рухається, відбудеться доплерівський зсув. Якщо мета рухається до радіолокатора CW, то частота сигналу, що повертається буде вище, як показано на малюнку\(\PageIndex{4}\) (b). Подібна архітектура до тієї, яка використовується з chirp радаром може бути використана (див. Рисунки\(\PageIndex{3}\) (bc)). Концепція може бути розширена на бістатичні радари, але тепер слід генерувати посилання на локальний осцилятор. Як було видно раніше, частота передавального носія може бути відновлена для цифрових модульованих сигналів, таких як сигнали, кодовані PSK, показані на малюнку\(\PageIndex{2}\) (d). Удосконалені радари високого класу використовують цифрову модуляцію та CDMA-подібні форми сигналу та використовують кодування простору та часу. Як правило, радіолокаційні форми хвиль, що передаються, щебетати, що є технікою, яка приймає бажану форму сигналу передачі і розтягує її в часі, щоб вона могла бути більш ефективно посилена і може бути передана більша потужність. У приймача радіолокаційний сигнал стискається в часі так, щоб він відповідав вихідному сигналу передачі до щебетання.
Повинно бути очевидним, що радари та радіолокаційні сигнали можуть бути оптимізовані для візуалізації або для використання доплерівських зрушень для відстеження рухомих цілей. Візуалізація підходить, коли мало безладу, наприклад, погляд у повітря. Однак важко виявити такі цілі, як автомобілі, які рухаються по землі. Так звана наземна індикація цілі (GMTI) радар спирається на доплерівські зрушення для розрізнення рухомих цілей, а потім здатність до точного зображення порушується. Значні зусилля спрямовані на розробку сигналів, які важко виявити (приховані) і оптимізовані для візуалізації або GMTI.
Виноски
[1] Для показаного циркулятора потужність, що надходить в порт 1 циркулятора, виходить на порт 2, а вхідний порт 2 подається в порт 3. Так порти 1 і 3 ізольовані.